An article written by members of SunTunTech project, and led by AZTI, about the opportunities of fishing route optimization decision support systems (FRODSS) was published in the Journal of Cleaner Production. It is worthwhile to mention that the journal is ranked as the third most important journal in the category of Green, Sustainable science, and Technology. The work entitled “Towards a framework for fishing route optimization decision support systems: Review of the state-of-the-art and challenges” points out the potential use of decision support systems with the aim of enhance the efficiency, sustainability, and safety of fisheries by helping skipper in the fishing strategy planning.

This article highlights the existing gap for the application of decision support systems in fisheries, and how the global fishing fleets can be grouped into four main groups whose fishing routes could be optimized in a similar way. This groups are: (i) small-scale coastal fleet; (ii) large-scale pelagic fleet; (iii) large-scale demersal fleet; and (iv) the distant-water fleet.
The fleet with the biggest potential of the use of FRODSS is the distant-water fleet which is the focus of SusTunTech project. Below is shown an example for a distant-water tuna purse seiner vessel operating in the Indian ocean. The aim of the problem was to find a route, which follows an exclusive fishing FAD-dependent strategy, that minimize the relationship between the fuel-oil consumption and the probability of catches. This simple example showed the potential benefits of the use of a FRODSS in the fishing strategy planning, by significantly reducing the fuel consumption and the time at sea.
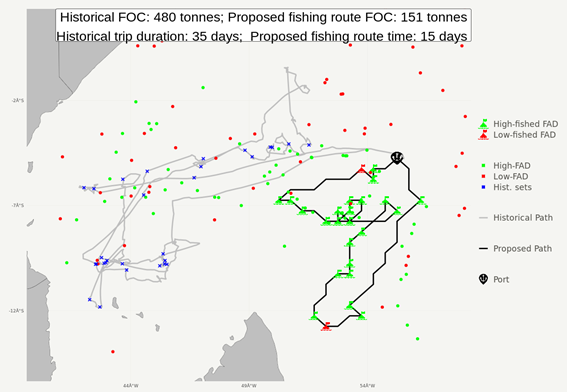
An example with a comparison between an historical fishing route (grey line) and the ones proposed by a FRODSS (black line). The dots represent the available FADs, and the colour indicates if there is a high probability of high catches (green) or low catches (red).
The research has been conducted thank to the data provided by Marine Instrument and Echebastar, partners of the SunTunTech project, and in collaboration with colleagues from AZTI, EHU-UPV, and Marine Instrument.
Read the original work here:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment